M.Sc. Martin Griese
Leitung, Vertikaldynamik – Gesamtkonzept und Stabilisierungsregelung

Leitung, Vertikaldynamik – Gesamtkonzept und Stabilisierungsregelung
Die Grundlage um Simulationen und analytische Rechnungen durchführen zu können sind Modelle, die das physikalische Verhalten des MonoCabs mathematisch abbilden. Eine wichtige Erkenntnis aus den Simulationen ist unter anderem die Dimensionierung der Komponenten (Antriebe, Mechanik, …). Fehler bei der Modellierung würden bei einer Fehlauslegung den Betrieb und Projekterfolg maßgeblich gefährden. Deshalb werden im Projekt bewusst mehrere Modellierungsansätze verfolgt und miteinander verglichen, um Fehler zu erkennen und zu vermeiden. Die im Projekt angewandten Methoden und daraus resultierende Modelle werden nachfolgend zusammengefasst.
Die Systemmodellierung ist ein äußerst wichtiger Teil des Entwurfsprozesses von Regelungssystemen. Ein genaues Modell eines dynamischen Systems ermöglicht ein besseres Verständnis des physikalischen Systems und erleichtert die Analyse und den Entwurf von Reglern. Das Verhalten von dynamischen Systemen wird durch Differentialgleichungen beschrieben. Einer der ersten Schritte im Entwurfsprozess ist es, diese Gleichungen aus physikalischen Gesetzen herzuleiten. Für die Herleitung der dynamischen Gleichungen gibt es mehrere Methoden. Für mechanische Systeme sind zwei gängige Ansätze die Lagrangesche Mechanik und die Newtonsche Mechanik.
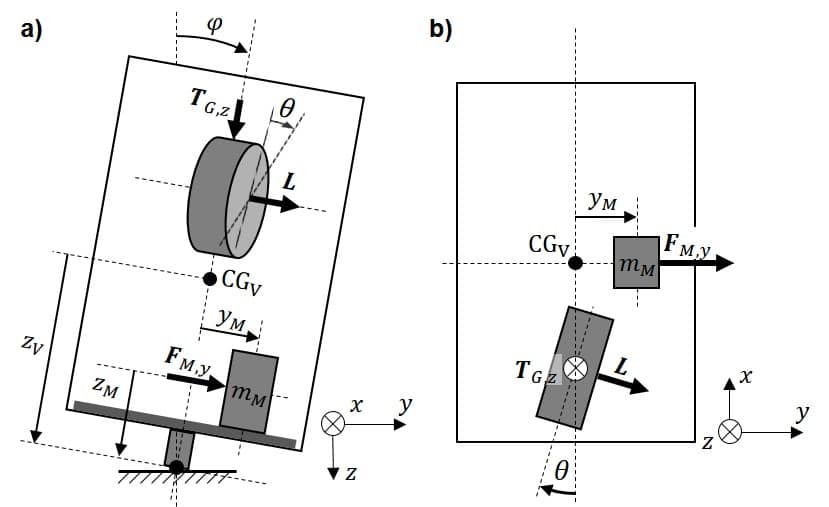
Basierend auf dem Lagrangeschen Formalismus wurde ein analytisches Modell des dargestellten Mehrkörpersystems von MonoCab (siehe Abbildung 1) unter Berücksichtigung aller Freiheitsgrade hergeleitet. Bei dieser Modellierung wird das Rahmenfahrzeug als inverses Pendel mit entsprechenden physikalischen Eigenschaften angenommen.
Das System besteht aus drei Körpern, dem Rahmenfahrzeug (inverses Pendel), der bewegten Masse und den Kreiseln. Im Sinne eines Lagrange-Ansatzes zur Modellierung des Gesamtsystems werden die kinetischen und potentiellen Energien berechnet und damit Lagrangesche Differentialgleichungen aufgestellt und die Bewegungsgleichungen ermittelt.
Abbildung 1: Schematische Darstellung der Körper zur Abbildung der Vertikaldynamik
Um die Dynamik komplexer Systeme zu berechnen und zu analysieren, kann die Mehrkörpersimulation verwendet werden. Hierbei erfolgt die Modellierung der Systeme durch massebehaftete Körper und durch masselose Verbindungselemente, wie z.B. Gelenke und Kraftelemente. Über Bewegungsgleichungen in Form von Differentialgleichungen wird die Dynamik des Systems als mathematisches Modell beschrieben. Das Lösen dieser Gleichungen liefert als Ergebnis der Simulation die Kräfte, Geschwindigkeiten, Beschleunigungen und Kontakte der Körper.
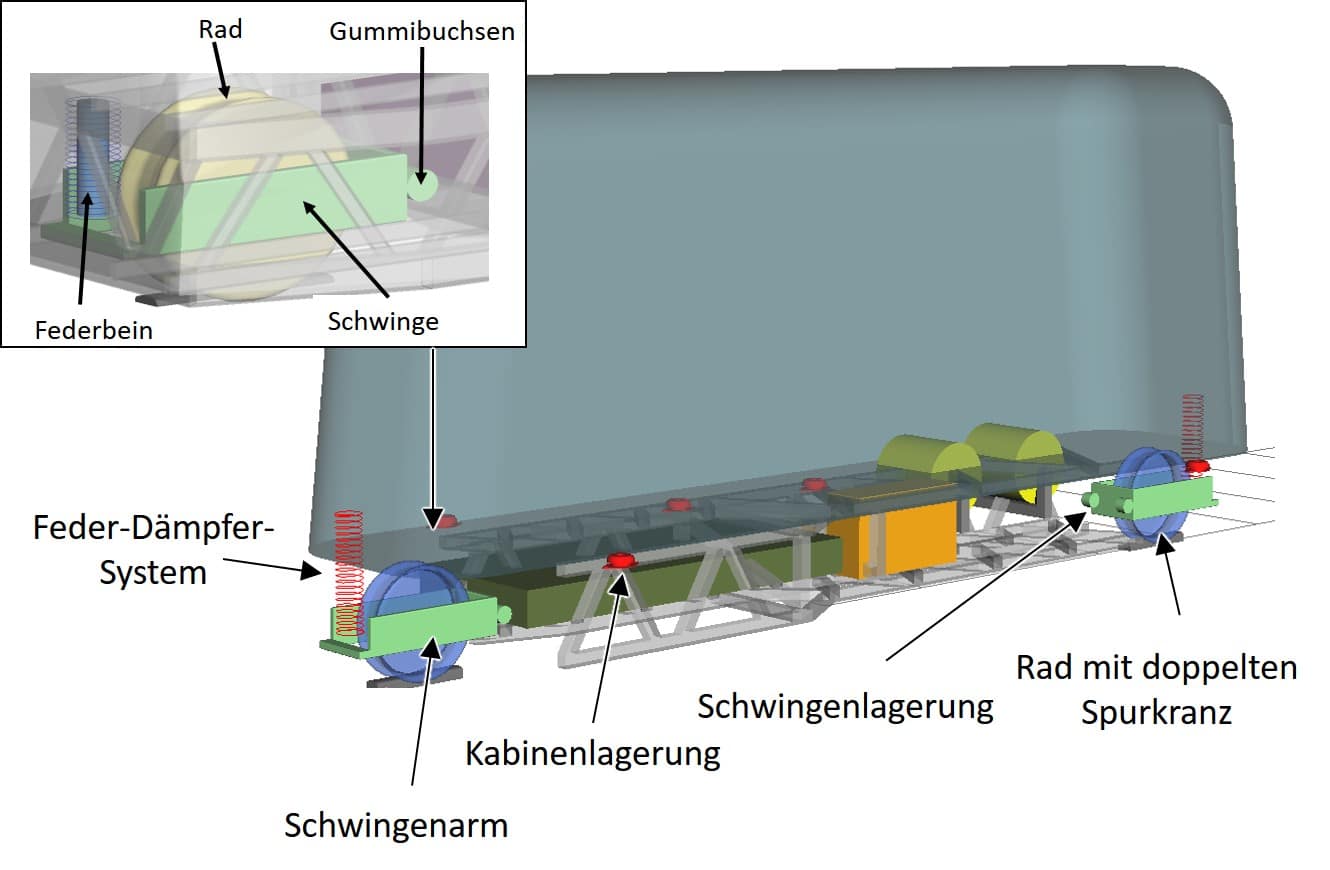
Im Rahmen der Mehrkörpersimulation sind mit den Tools Simpack und Simscape numerische Mehrkörpermodelle des MonoCabs entstanden (siehe Abbildung 2). In den Modellen werden alle relevanten Körper des Fahrzeuges, wie z.B. Fahrzeugaufbau, Fahrwerk, Stabilisierung, Kabine, Batterie, Elektromotoren etc. mit dessen Massen- und Trägheitseigenschaften berücksichtigt. Die Kinematik des Gesamtsystems ergibt sich durch die Koppelung der einzelnen Körper über verschiedene Gelenke. Bei den Modellen in Simpack liegt ein besonderer Fokus auf dem Fahrwerk und Rad-Schiene-Kontakt. Entsprechend ist hierbei vor allem die Kinematik des Fahrwerks (Schwinge), die elastischen Fahrwerkskomponenten wie Feder, Dämpfer und Gummilager als auch der nichtlineare Rad-Schiene-Kontakt abgebildet. Die Modelle enthalten alle Freiheitsgrade des realen Fahrzeuges.
Abbildung 2: Mehrkörpermodell des MonoCabs in Simpack
Die entwickelten Modelle erlauben eine Vielzahl an Simulationen und damit verbundene Untersuchungen als auch Auslegungen von Systemen und Algorithmen. Eine geordnete Vorgehensweise und Nutzung der Werkzeuge ist hierbei wichtig, damit eine Interpretation der Ergebnisse überhaupt möglich ist. Bei Nutzung eines komplexen Gesamtmodelles mit allen auftretenden Effekten können auftretende Fehlverhalten andernfalls kaum gedeutet und differenziert werden. Der Einsatz von Teilmodellen (z.B. ausschließlich Vertikaldynamik) und unterschiedlichen Simulationswerkzeugen erlaubt eine gezielte und schrittweise Vorgehensweise. Die angewandten Methoden sowie die damit verbundenen Untersuchungen werden nachfolgend erläutert.
Auf Basis der analytischen Modelle sind weiterführende Rechnungen durchführbar, mit denen Zusammenhänge besser verstanden und interpretiert werden können. Auf Basis analytischer Rechnungen wurde z. B. untersucht, wie die Kreiselsysteme und die verschiebbare Masse im MonoCab grundlegend gestaltet werden müssen bzw. welche Bedingungen mit diesen einhergehen. Weiterhin stellen analytische Rechnungen die Grundlage der Reglerauslegung dar, was insbesondere für die Stabilisierungsregelung eine entscheidende Rolle spielt. Die Komplexität des Gesamtsystems ermöglicht allerdings keine rein-analytische Betrachtung aller Effekte und Zusammenhänge. An dieser Stelle schließen die numerischen Simulation an.
Unter einer Offline-Simulation soll hier die rechnergestützte Simulation des Fahrzeuges (z.B. als Regelstrecke) zusammen mit den Algorithmen der Steuergeräte (z.B. als Regler) in einem zusammenhängenden Simulationsaufbau verstanden werden. Hierfür wird das Tool Mathworks Simulink® eingesetzt. Neben der Simulation bietet das Tool den Vorteil, dass die entwickelte Steuergerätesoftware direkt kompiliert und auf die Steuergeräte (Rapid Control Prototyping) hochgeladen werden kann, siehe auch HIL-Simulation.
Die Offline-Simulation stellt die grundlegende erste Stufe für die Untersuchungen dar. Hierbei werden sowohl die Teilbereiche Vertikaldynamik und Längsdynamik gesondert als auch Gesamtmodelle (z.B. via Simscape) betrachtet. Die Untersuchungen umfassen:

Die HIL-Simulation findet mit Hilfe von Hardware der Firma dSPACE statt. Die Abbildung 3 zeigt den Aufbau der Hardware, die für die HIL-Simulation verwendet wurde.
Abbildung 3: HIL-Aufbau mit realer Hardware
Der untere Teil beinhaltet hauptsächlich ein Multiprozessorboard, auf dem Modelle der Dynamiken des MonoCabs simuliert werden. Zusätzlich dazu ist dort eine Schnittstellenkarte installiert, die über 4 CAN-Anschlüsse verfügt.
Der obere Aufbau aus Aluminiumprofilen ist mit 4 Steuergeräten vom Typ MicroAutoBox II, kurz MABX, ausgestattet. Diese dienen zum Rapid Control Prototyping und sind baugleich im MonoCab verbaut. Auf Ihnen läuft dieselbe Software wie später im Fahrzeug, also beispielsweise Regelalgorithmen für die Vertikalstabilisierung und die Fahrantriebe, Ablaufsteuerungen für die Inbetriebnahme und Abrüstung des MonoCabs etc. Jede dieser Boxen besitzt ebenfalls 4 CAN-Anschlüsse, sowie weitere analoge und digitale Ein- und Ausgänge.
Alle 4 MABX und das Multiprozessorboard sind per Ethernet mit einem Switch und über diesen mit einem PC gekoppelt. Mit diesem PC wird die Software auf die einzelnen Steuergeräte und den Simulator aufgespielt. Während der Simulation kann in die Software eingegriffen und Messwerte aufgezeichnet werden.
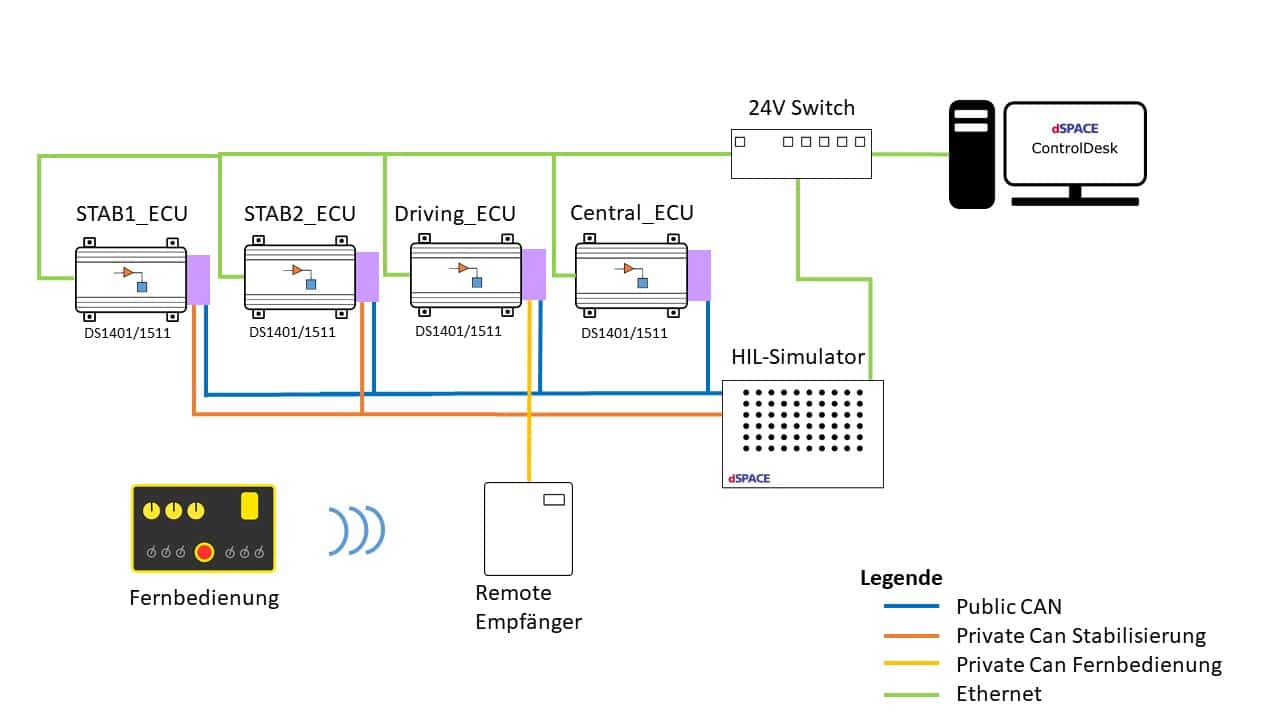
Zusätzlich ist eine Empfangseinheit einer Fernbedienung am HIL angeschlossen (in Abbildung 1 nicht zu sehen). Diese wurde per CAN mit der Driving_ECU verbunden. So kann das modellierte MonoCab bereits per Fernbedienung gesteuert, und die Einbindung der Fernbedienung in das Gesamtkonzept getestet werden.
Der Aufbau ist in Abb. 4 mit allen wichtigen Verbindungen schematisch dargestellt.
Abbildung 4: struktureller Aufbau der HIL-Simulation
Mit Hilfe dieses Aufbaus werden verschiedene Simulationen durchgeführt:
Das Video 1 zeigt die HIL-Simulation des MonoCabs. Dabei werden die Messdaten des HIL-Simulators für die Animation verwendet. Ausgehend von der Parkposition (ausgeschalteter Zustand mit Abstützung über die tertiäre Stabilisierung) wird das Fahrzeug eingeschaltet und mithilfe der Stabilisierung aufgerichtet. Das Fahrzeug ist daraufhin fahrbereit und beschleunigt bis auf eine Zielgeschwindigkeit von 60 km/h. Im Bogen neigt sich das Fahrzeug, sodass die Querbeschleunigung ausgeglichen ist.
Video 1: Animation des Fahrzeuges in dSPACE MotionDesk
Zur Analyse des Gesamtsystems werden Co-Simulationen durchgeführt. Die Co-Simulationen beinhalten zum einen das mechanische Modell vom Fahrzeug in Form des Mehrkörpersimulationsmodells in dem Tool Simpack und zum anderen das Modell der Regelung der Stabilisierung indem Tool Mathworks Simulink®.
Durch die Co-Simulation wird die Funktionalität des MonoCab Konzeptes bereits zu einem frühen Zeitpunkt des Projektes numerisch sichergestellt, da hierdurch das vollständige dynamische Verhalten des Fahrzeuges als Gesamtsystem untersucht wird. Hierzu werden Analysen hinsichtlich der Fahrsicherheit und des Fahrkomforts durchgeführt. Es erfolgt eine genauere Betrachtung der Laufstabilität, des Seitenwindes, der Entgleisungssicherheit, des Begegnungsverkehrs und der Dynamik und Grenzen der Stabilisierung.
Ebenso wird das Mehrkörpermodell im Zusammenhang mit der Co-Simulation im Rahmen der konstruktiven Auslegung des Fahrwerks dazu verwendet, um mit Hilfe von Parametervariationen die Steifigkeit, Dämpfung und Abmessungen des Fahrwerks mit Blick auf die Fahrsicherheit und den Fahrkomfort zu bestimmen. Die Parameter werden wiederum als Basis für die Recherche und Beschaffung passender Bauteile, wie z.B. Federbeine des Fahrwerks verwendet.
Das Video 2 zeigt eine CO-Simulation des MonoCabs. Zu Beginn des Videos ist die Stabilisierung bereits aktiv und das Fahrzeug fährt mit einer Zielgeschwindigkeit von 60 km/h. Durch simulierte Gleislagefehler sind die Stabilisierungssysteme aktiv im Eingriff.
Video 2: CO-Simulation eines MonoCabs mit Gleislagefehlern

Wissenschaftlicher Mitarbeiter – Vertikaldynamik – Sicherheitsfunktionen, Modellierung, Mehrkörpersimulation mit Simscape, HIL-Simulation
Wissenschaftlicher Mitarbeiter– Längsdynamik – Regelung, Sicherheit und Modellierung, HIL-Simulation
Wissenschaftlicher Mitarbeiter – Mehrkörpersimulation mit Simpack; Fokus: Fahrwerk und Rad-Schiene-Kontakt
Wissenschaftliche Hilfskraft – Vertikaldynamik – Sicherheitsfunktionen, HIL-Simulation
