M.Sc. Martin Griese
iFE – Institut für Energieforschung / Institute Future Energy. Technische Hochschule Ostwestfalen-Lippe / OWL
Leitung, Gesamtkonzept, Auslegung und Stabilisierungsregelung

iFE – Institut für Energieforschung / Institute Future Energy. Technische Hochschule Ostwestfalen-Lippe / OWL
Leitung, Gesamtkonzept, Auslegung und Stabilisierungsregelung
Die Arbeitsgruppe Stabilisierung beinhaltet die Entwicklung, Aufbau und Inbetriebnahme des aktiven Stabilisierungssystems, mit dem Ziel das Fahrzeug in einer vertikalen Position über der Schiene zu halten. Dabei muss das Stabilisierungssystem sowohl dynamische als auch stationäre Störungen ausgleichen können.
Das Stabilisierungssystem setzt sich aus dem primären, sekundären und tertiären Teilsystem zusammen. Als primäres Stabilisierungssystem wird ein Kreiselsystem verwendet, welches dynamische und sprungartige Störungen kompensiert, während das sekundäre Stabilisierungssystem stationäre Störungen mithilfe einer verschiebbaren Masse ausgleicht.
Die Stabilisierung ist in einer bzgl. Sicherheit und Komfort praktikablen Form weder mit einem aktiven Kreisel noch mit einer Gewichtsverlagerung als jeweils alleiniges Stabilisierungssystem erreichbar. Durch ein ausschließlich aktives Kreiselstabilisierungssystem können sehr schnell stabilisierende, aber begrenzte Drehimpulse erzeugt werden.
Liegt durch Seitenwind oder einseitige Beladung eine stationäre Störung des Gleichgewichts vor, müsste dies durch eine permanente Schräglage (Abweichung von der geometrischen Vertikalposition) des Fahrzeugs ausgeglichen werden. Eine ausschließliche Stabilisierung über eine Gewichtsverlagerung ist ebenfalls auszuschließen, da eine Bewegung der Masse stets eine Reaktionswirkung mit sich bringt, die dem gewünschten Ausgleichsmoment entgegengesetzt ist.
Neben den beiden bereits genannten Systemen zur Stabilisierung der Vertikallage, können beim Stillstand des MONOCABs vier Stützen ausgefahren werden, um das Fahrzeug beispielsweise beim Parken, bzw. im Fehlerfall zu stabilisieren. Die mechanische Abstützung stellt das tertiäre Stabilisierungssystem dar.
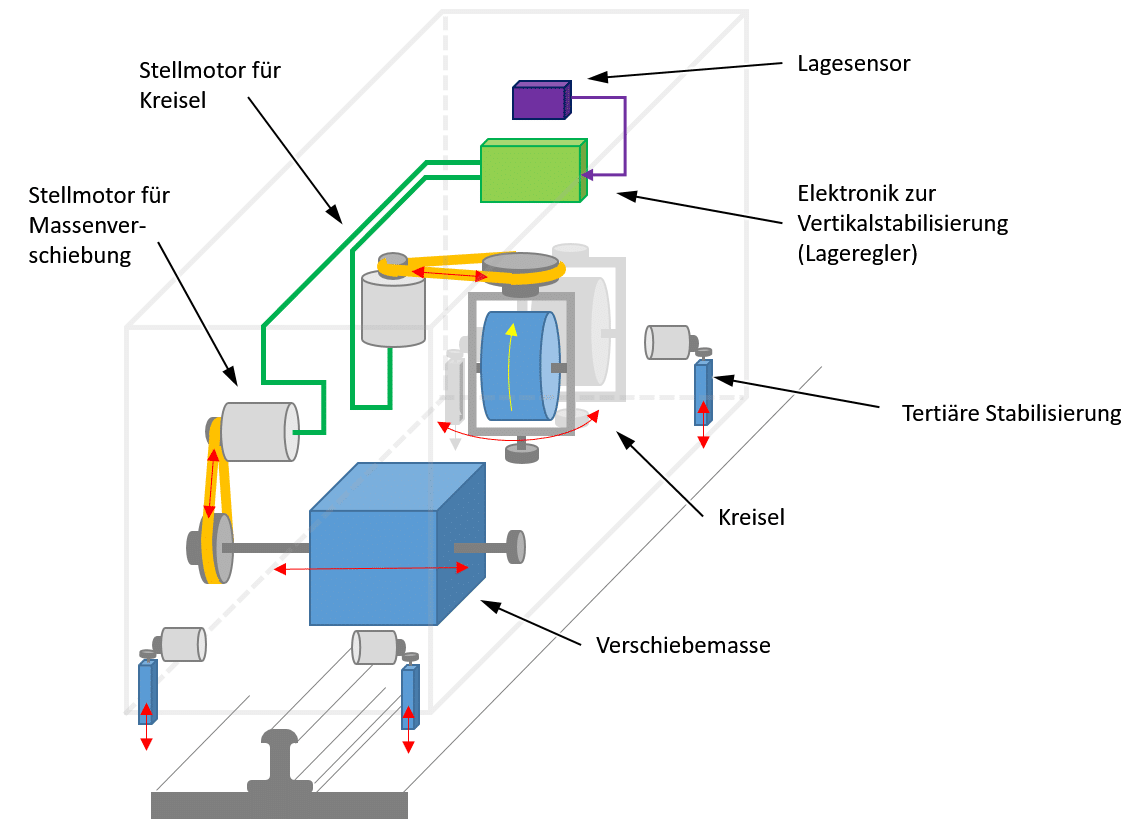
Die verschiedenen Stabilisierungssysteme sind in Abbildung 1.1 schematisch dargestellt. Neben den drei Systemen ist zur aktiven Stabilisierungsregelung eine Sensorik zur Erfassung der Fahrzeuglage und -bewegung erforderlich. Hierfür werden sogenannte IMU-Sensoren eingesetzt, die aus Beschleunigungs- und Drehratensensoren bestehen. Eine Sensorfusion erlaubt eine genaue und dynamische Erfassung des hier relevanten Rollwinkels. Die Auswertung der Sensoren, Ansteuerung der Aktoren sowie die Regelungs- und Steuerungstechnik ist auf zwei redundant ausgeführten Steuergeräten implementiert. Fällt z. B. ein Steuergerät aus, kann das zweite Steuergerät bis zum sicheren Stillstand übernehmen.
Abbildung 1.1 Darstellung des MonoCabs mit den drei Stabilisierungseinheiten
Im MONOCAB dienen zwei je 250 kg schwere Kreisel, die mit 4800 Umdrehungen pro Minute rotieren, als Aktoren. Mit ihnen kann durch eine erzwungene Drehung um die Präzessionsachse ein Drehmoment um die Rollachse des Fahrzeugs erzeugt werden. Die zwei Kreisel arbeiten mit gegensinniger Rotation als auch gegensinniger Präzessionsbewegung. Dadurch lassen sich von außen erzwungene Bewegungen kompensieren, was beispielsweise bei Bogenfahrten wichtig ist. Im Fall eines Systemausfalls verhindern die Kreisel ein sofortiges Umkippen des Fahrzeuges. Der hohe Drehimpuls bleibt mehrere Minuten bis Stunden erhalten. Um die passive Wechselwirkung zwischen der Pendelbewegung des Fahrzeuges und des Kreiselsystems vorteilhaft ausnutzen zu können, ist eine Reduktion der Reibung erforderlich. Dies kann durch eine Freischaltung der Kreiselpräzession von dessen Aktorik in Kombination mit einer passiven mechanischen Vorrichtung erfolgen. Dieser Betriebszustand ist durch eine langsam aufklingende Pendelbewegung des Fahrzeuges charakterisiert, also selbst instabil. Je nach Dämpfung im System verbleibt jedoch eine ausreichende Zeit, um eine Notbremsung einzuleiten, das Abstützsystem auszufahren und damit das Fahrzeug in einen sicheren Betriebszustand zu bringen.
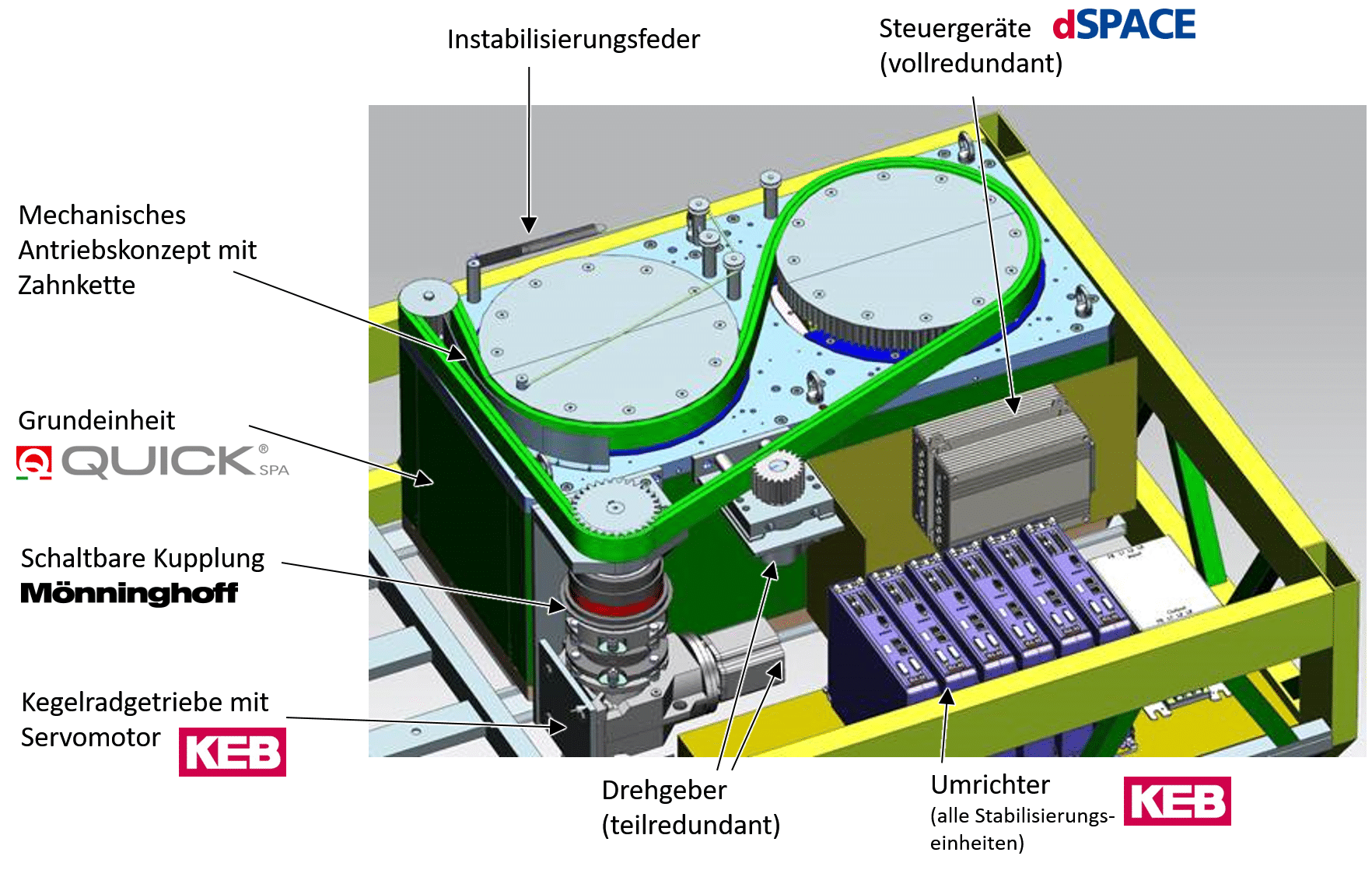
Die Abbildung 1.2 zeigt den Aufbau dieses Stabilisierungssystems. Die Kreisel sind als Grundeinheit selbst aus dem Bootsbereich zugekauft. Die Firma Quick (Italien) stellt Kreiselsysteme mit eigener Aktorik her, die zur Dämpfung der Wankbewegung bei Booten und Jachten eingesetzt werden. Hier ist die Rotationsachse der Kreisel ist senkrecht zur Fahrtrichtung und kann durch einen umrichtergespeisten Servomotor verändert werden. Die Änderungsraten des Präzessionswinkels sind vergleichsweise gering, sodass eine Untersetzung sinnvoll ist. Im aktuellen Entwicklungsstand wird hierfür ein Kegelradgetriebemotor eingesetzt. Über eine Antriebskette und Ritzel wird der Motor mit den Kreiselachsen verbunden.
Um den gewünschten passiven Zustand im Fehlerfall herzustellen, kann die Kreiselmechanik über eine schaltbare Kupplung von der Aktorik freigeschaltet werden. Durch eine Feder wird die passive Präzessionsbewegung verstärkt und in die gewünschte instabile Lage gebracht. Neben der Erfassung der Kreiselposition über einen Geber am Motor ist als teilredundante Sensorik ein Geber an einem Kettenritzel integriert. Im Sinne der funktionalen Sicherheit kann z. B. ein Durchrutschen des mechanischen Antriebsstranges erkannt werden.
Abbildung 1.2 Darstellung des primären Stabilisierungssystems
Als sekundäres Stabilisierungssystem kann eine sogenannte Stabilisierungsmasse lateral im Fahrzeug verschoben werden, um den Gewichtsschwerpunkt des Einschienenfahrzeugs zu verlagern. Durch die Verlagerung des Gewichtsschwerpunkts lassen sich stationäre Störungen, beispielsweise eine ungleichmäßige Beladung des Fahrzeugs, ausgleichen. Das gewünschte Ausgleichsmoment ist proportional zur lateralen Verschiebung, während beim Beschleunigen der Masse stets ein Drehmoment als Reaktionswirkung auftritt. Letzteres ist dem Ausgleichsmoment entgegengesetzt und somit unerwünscht. Dieser Effekt wird in der Systemtheorie als nicht-minimalphasiges Verhalten bezeichnet.
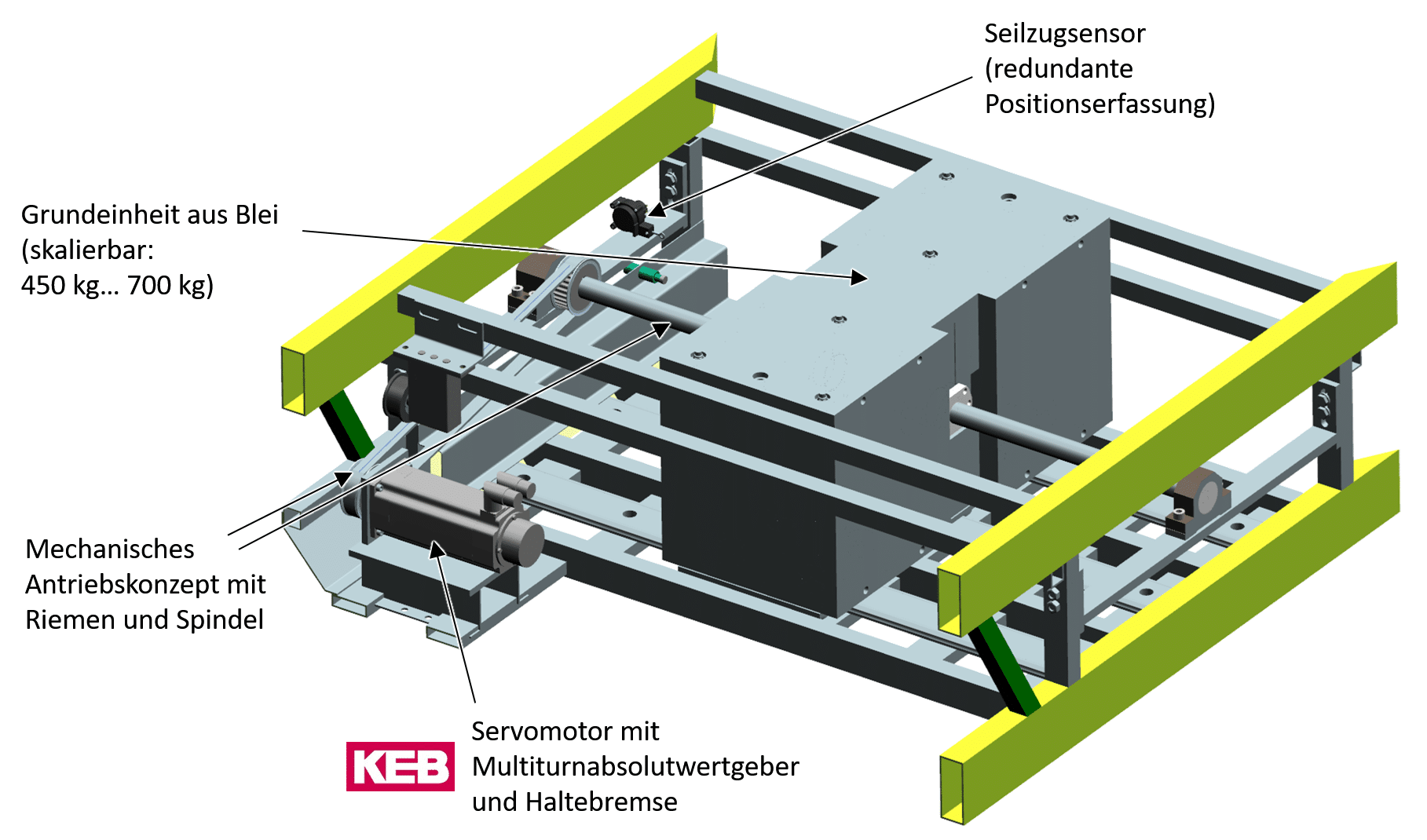
Die Abbildung 1.3 zeigt den Aufbau dieses Stabilisierungssystems. Der verschiebbare Block ist größtenteils aus Blei hergestellt, um eine hohe Masse bei gleichzeitig kompakten Abmessungen zu erhalten. Im derzeitigen Entwicklungsstand weist die Stabilisierungsmasse ein Gewicht von ca. 600 kg auf. Die Stabilisierungsmasse kann durch einen umrichtergespeisten Servomotor bewegt werden. Zur Übersetzung der rotatorischen Motorbewegung in eine translatorische Verschiebung wird eine Kugelumlaufspindel eingesetzt, die über einen Riemen mit dem Motor verbunden ist. Neben der Erfassung der Massenposition über einen Absolutwertgeber am Motor ist als redundante Sensorik ein Seilzugsensor integriert. Im Sinne der funktionalen Sicherheit können z. B. Fehler im Gebersystem erkannt werden.
Abbildung 1.3 Schematische Darstellung der Stabilisierungsmasse
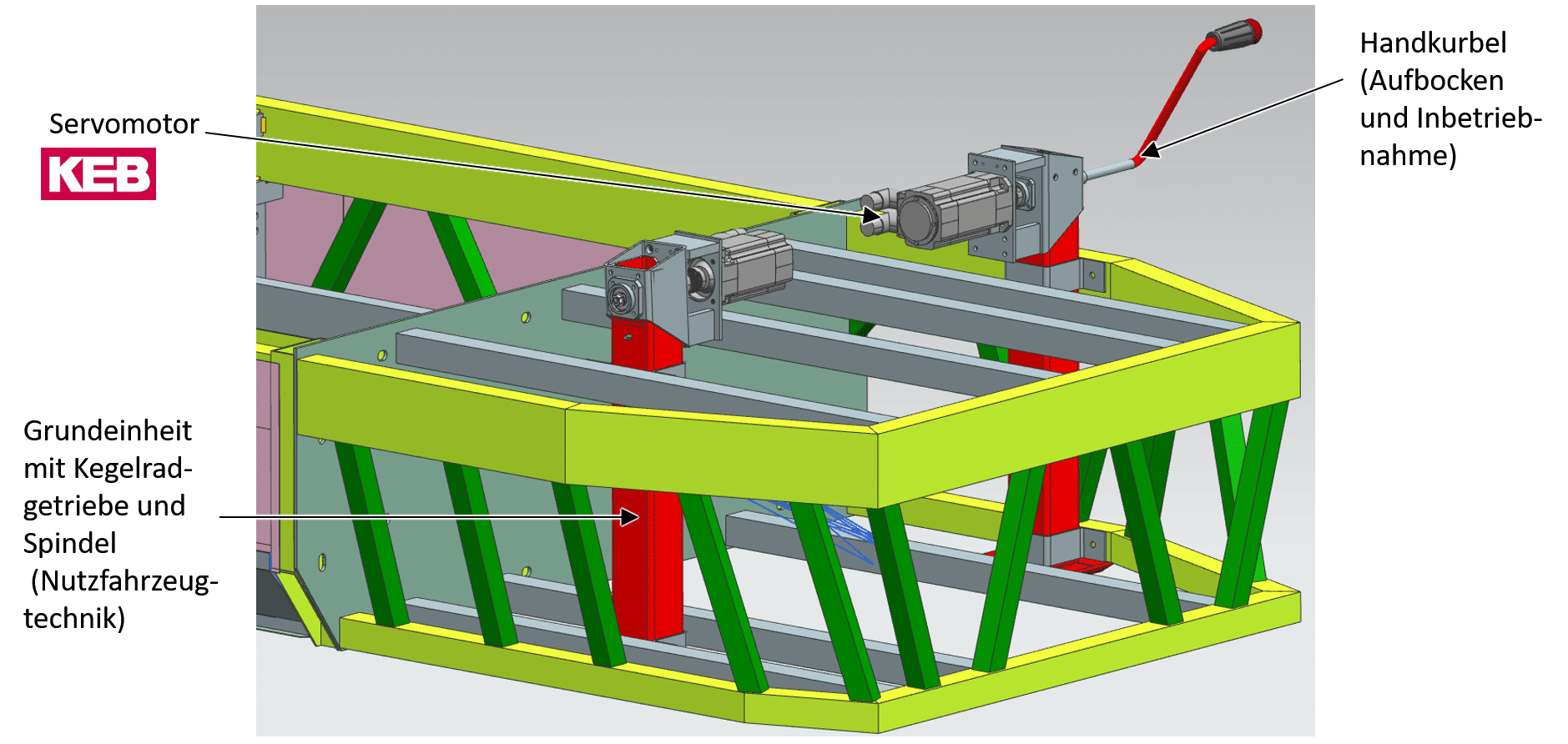
Als tertiäres Stabilisierungssystem für Notfälle und für das Abstützen der geparkten und abgeschalteten MONOCABs ist ein System entwickelt worden, das eine mechanische Abstützung im Gleisbett ermöglicht. Dazu können vier Stützen, die in den Ecken des MONOCABs positioniert sind, ausgefahren werden. Neben diesen Funktionen, kann mit den vier Stützten das Fahrzeug vollständig aufgebockt werden, was im derzeitigen Entwicklungsstand für das Auf- und Abgleisen (Testbetrieb) sowie für Wartungsarbeiten erforderlich ist.
Die Abbildung 1.4 zeigt den Aufbau dieses Stabilisierungssystems. Als Grundeinheit wird eine handelsübliche Stütze mit Handkurbel aus dem Nutzfahrzeugsegment verwendet. Diese ist im Rahmen des Projektes derart modifiziert worden, dass die ursprüngliche Handkurbel durch einen elektrischen Motor ersetzt wird. Auf die Welle lässt sich für den manuellen Betrieb eine Handkurbel stecken.
Abbildung 1.4 Schematische Darstellung des Tertiären Stabilisierungssystems
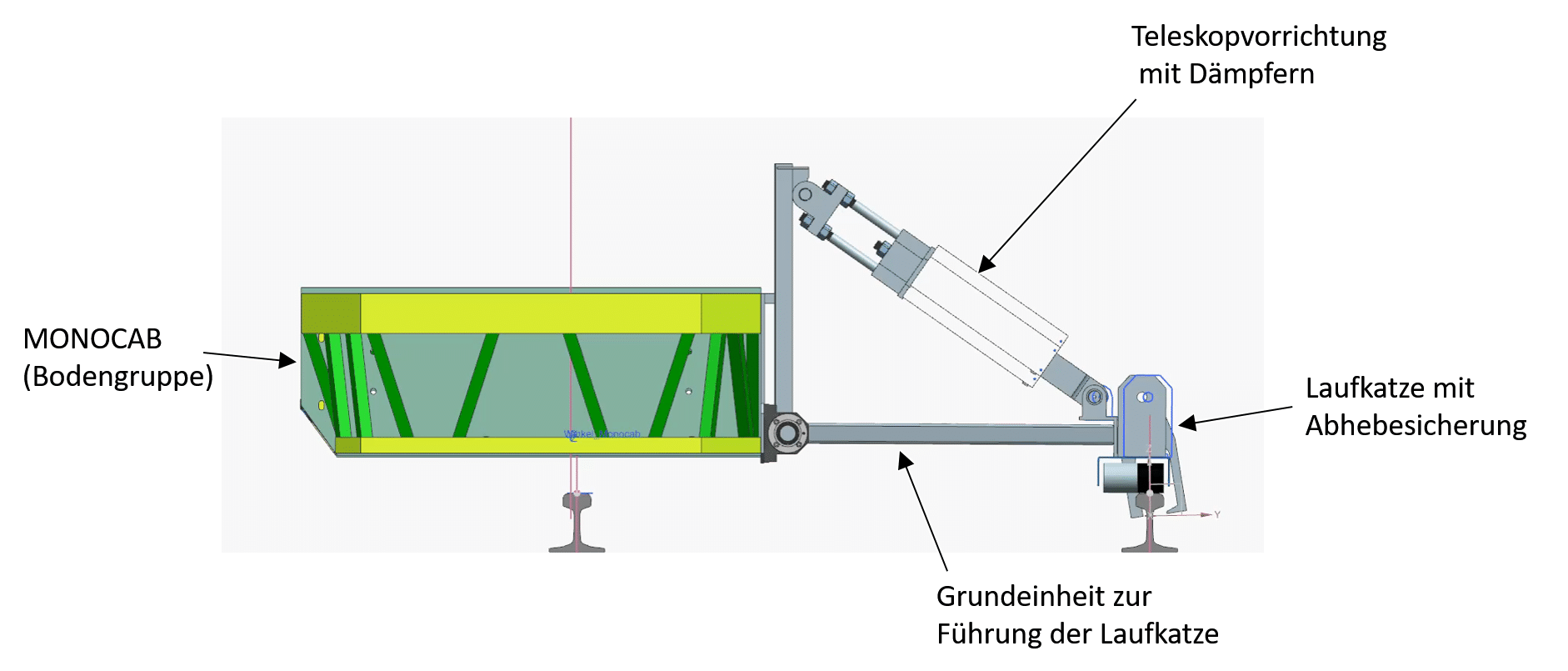
Während der Testphase des Projekts wird das MONOCAB durch eine Fangvorrichtung mechanisch vor dem Umkippen gesichert. Durch die Fangvorrichtung kann das Fahrzeug nicht aus einen Toleranzbereich von ± 4 ° um die Ruhelage umkippen. In Abbildung 2.1 ist der Aufbau der Fangvorrichtung zu sehen. Diese besteht aus einer Laufkatze mit einer Abhebesicherung, welche parallel zum MONOCAB auf der anderen Schiene mitfährt. Die Laufkatze ist über eine Teleskopvorrichtung mit integrierten Dämpfern mit dem Rahmen des Fahrzeugs verbunden. Die Teleskopvorrichtung hat in dem Bereich von ± 4 ° um die vertikale Ruhelage nur einen geringen Einfluss auf das Stabilisierungsverhalten des MONOCABs. Außerhalb dieses Bereichs wird ein Umkippen des Fahrzeugs verhindert.
Abbildung 2.1 Schematische Abbildung der Fangvorrichtung
Um die Stabilisierung des MONOCABs zu analysieren, wurde ein Vertikalprüfstand aufgebaut. Dieser ist derart charakterisiert, dass sich der Aufstandspunkt des Hinterrades durch eine Fußpunktverschiebung lateral verschieben lässt. Hiermit können relevante Gleislagefehler näherungsweise nachgebildet als auch Testsignal für Modalanalysen aufgeschaltet werden. Die Fußpunktverschiebung ist über einen elektrischen Antrieb mit Spindel realisiert.

Konzeption, Auslegung und Konstruktion der Stabilisierungssysteme und Hilfsvorrichtungen
Konzeption, Auslegung und Konstruktion des Fahrzeugrahmens und Hilfsvorrichtungen
Gesamtkonzept
Unterstützung bei der Konstruktion, Elektroplanung und -installation



